Теорема Фурье гласит, что любой сигнал можно разложить в ряд по ортонормированному набору периодических функций (например, по синусам и косинусам) с частотами кратными частоте периодического сигнала. Таким образом, в основе спектрального анализа сигнала лежит поиск весовых коэффициентов (в общем случае комплексных), модуль которых соответствует доли мощности колебаний соответствующей гармоники, вносимой в общую суперпозицию всех гармоник.
Быстрое преобразование Фурье
Быстрое преобразование Фурье - это алгоритм вычисления, который успешно использует свойства периодичности тригонометрических функций для того, чтобы избежать ненужных вычислений в дискретном преобразовании Фурье (ДПФ), за счёт чего быстрее осуществляется поиск коэффициентов в разложении Фурье. Основное отличие от дискретного преобразования заключается лишь в методе вычисления числовых значений (алгоритме), а не в самой обработке сигнала. И в случае БПФ, и в случае ДПФ результат вычислений один и тот же . Единственным требованием для алгоритма БПФ является размер выборки, кратный N = 2L, где L - любое положительное целое число. Наиболее распространёнными алгоритмами БПФ по основанию 2 являются: с прореживанием по времени и с прореживанием по частоте.
В данной работе реализован алгоритм БПФ по основанию 2 с прореживанием по времени (алгоритм Кули - Тьюки). Его легко получить, исследуя некоторые закономерности ДПФ. Введём так называемый поворотный коэффициент:
В этом случае в ДПФ коэффициенты Фурье для ряда значений сигнала {f0,f1,…,fN-1} выражаются соотношением:
Рассмотрим ряд сигнала из 4 значений: {f0,f1,f2,f3}. Представим преобразование Фурье в матричном виде (нормировочный коэффициент 1/N внесён в вектор-столбец Сij в правой части выражения):
Расписав поворотные коэффициенты по формуле Эйлера и определив их значения при k = 0, 1, 2,.. 9, можно построить диаграмму (Рис. 2), из которой видна закономерность повторяющихся коэффициентов.
Рисунок 2. Степенной ряд w для N=4
Подставляя численные значения в (4) получим:
То есть значения w, начиная с w4, равны соотвествующему значению от w0 до w3. Далее перепишем матричное уравнение (4) в нестандартном виде (подобные обозначения введены для наглядности дальнейших операций):
Поменяем местами столбцы матрицы, разделив её на две группы: по чётным f0, f2 и нечётным f1, f3 индексам:
Учтём, что wk+1 = wkw1, тогда выражение (6) перепишется в виде:
Используя соотношения:
Получаем искомые коэффициенты разложения в виде вектора-столбца со значениями ячеек:
Графическое изображение алгоритма (Рис. 3) похоже на бабочку с распахнутыми крыльями, поэтому этот метод вычисления называют «бабочкой».
Рисунок 3. Граф «Бабочка» для ряда из 4 членов
Итак, на первом шаге алгоритма идёт разбиение по чётным и нечётным индексам членов ряда значений сигнала. Затем выполняется граф «бабочка», он состоит из двух ступеней, их количество равно степени двойки объёма выборки (N = 4 = 22). На каждом ступени выполняется по две «бабочки» и их общее количество неизменно. Каждой операции «бабочка» соотвествует одна операция умножения. Для сравнения: в ДПФ с выборкой {f0,f1,f2,f3} операцию умножения необходимо было бы выполнить 4Ч4 = 16 раз, а в случае БПФ всего лишь 4 раза .
Введение
Книги и публикации по цифровой обработке сигналов пишут авторы зачастую не догадывающиеся и не понимающие задач, стоящих перед разработчиками. Особенно это касается систем, работающих в реальном времени. Эти авторы отводят себе скромную роль бога, существующего вне времени и пространства, что вызывает некоторое недоумение у читателей подобной литературы. Данная публикация имеет целью развеять недоумения, возникающие у большинства разработчиков, и помочь им преодолеть «порог вхождения», для этих целей в тексте сознательно используется аналогии и терминология сферы программирования.
Данный опус не претендует на полноту и связность изложения.
Добавлено после прочтения комментариев.
Публикаций о том как делать БПФ немеряно, а о том как сделать БПФ, преобразовать спектр, и собрать сигнал заново, да еще и в реальном времени, явно не хватает. Автор пытается восполнить этот пробел.
Часть первая, обзорная
Существуют два основных способа построения дискретных линейных динамических систем. В литературе, такие системы принято называть цифровыми фильтрами, которые подразделяются на два основных типа: фильтры с конечной импульсной характеристикой (КИХ) и фильтры с бесконечной импульсной характеристикой (БИХ).
Алгоритмическая сущность фильтра с КИХ заключается в дискретном вычислении интеграла свертки:
Где x(t) – входной сигнал
y(t) – выходной сигнал
h(t) – импульсная характеристика фильтра или реакция фильтра на дельта функцию. Импульсная характеристика является обратным преобразованием Фурье комплексной частотной характеристики фильтра K(f).
Для формирования ясной картины у читателя, приведем пример дискретного вычисления интеграла свертки на языке С в реальном времени.
#define L (4) //длинна фильтра
int FIR(int a)
{
static int i=0; //текущая позиция
static int reg[L]; //массив входных значений
static const int h[L]={1,1,1,1};//импульсная характеристика
int b=0;//выходное значение
reg[i]=a; //копируем входное значение в массив входных значений
for(int j=0;j Вызывая данную функцию через определенные интервалы времени T и передавая ей в качестве аргумента входной сигнал, на выходе мы получим выходной сигнал, соответствующий реакции фильтра с импульсной характеристикой вида: H(t)=1 при 0 Всем собравшимся фильтр с такой импульсной характеристикой более известен под названием «фильтр скользящего среднего», и, соответственно, реализуется он гораздо проще. В данном случае такая импульсная характеристика используется для примера. Синтезу импульсных характеристик КИХ фильтров посвящена масса литературы, также имеются готовые программные продукты для получения фильтров с заданными свойствами. Автор предпочитает глючный инструмент Filter Design из пакета Matlab, но это дело вкуса. Используя фильтр с конечной импульсной характеристикой, удается немножечко воспарить над привычной реальностью, так как, в природе не существует динамических систем, имеющих конечную импульсную характеристику. Фильтр КИХ - попытка зайти в частотно-временную область с другого конца, не так как ходит природа, поэтому частотные характеристики этих фильтров зачастую обладают неожиданными свойствами. Намного ближе к природе фильтры с бесконечной импульсной характеристикой. Алгоритмическая сущность фильтров с бесконечной импульсной характеристикой сводится к рекуррентному (не путать с рекурсивным!) решению дифференциального уравнения, описывающего фильтр. То есть, каждое последующие значение выходного сигнала фильтра вычисляется на основании предыдущего значения. Именно так протекают процессы в реальном мире. Камень, падая с небоскреба каждую секунду, увеличивает свою скорость на 9.8м/с Speed=Speed+9.8, и пройденный путь каждую секунду увеличивается Distance=Distance+Speed. Кто скажет, что это не рекуррентный алгоритм, пусть первый бросит в меня камень. Только в нашей Матрице
временной интервал вызова функции возвращающей положение камня много меньше цены деления доступных нам средств измерения. Отдельно хотелось бы определить понятие «порядок фильтра». Это количество переменных которые подвергаются рекуррентным операциям. В приведенном примере функция, возвращающая скорость камня - первого порядка, функция, возвращающая пройденный путь - второго порядка. Для окончательного просветления читателя приведем пример на языке С самого простого фильтра низких частот, широко известного как фильтр «фильтр экспоненциального сглаживания» #define alfa (2) //параметр сглаживания
int filter(int a)
{
static int out_alfa=0;
out_alfa=out_alfa - (out_alfa >>alfa) + a;
return (out_alfa >> alfa);
}
Вызывая данную функцию с частотой F и передавая ей в качестве аргумента входной сигнал, на выходе мы получим выходной сигнал, соответствующий реакции фильтра низких частот первого порядка с частотой среза: Приведенный пример исходного кода совершенно неудобоварим с точки зрения понимания сути алгоритма. С точки зрения рекуррентной сути (смотри «падение камня») алгоритма, правильнее y=y+((x-y)>>alfa);, но в этом случае происходит потеря alfa значащих разрядов. Рекуррентное выражение фильтра, из примера кода, построено таким образом, чтобы избежать потери значащих разрядов. Именно конечная точность вычислений может испортить всю прелесть цифрового фильтра с бесконечной импульсной характеристикой. Особенно это заметно на фильтрах высоких порядков, отличающихся высокой добротностью. В реальных динамических системах такая проблема не возникает, наша Матрица
производит вычисления с невероятной для нас точностью. Синтезу подобных фильтров посвящена масса литературы, также имеются готовые программные продукты (см. выше). Часть вторая. Фурье – фильтр
Из вузовских курсов (у вашего покорного слуги это был курс ОТЭЦ) многие собравшие помнят два основных подхода к анализу линейных динамических систем: анализ во временной области и анализ в частотной области. Анализ во временной области - это решение дифференциальных уравнений, интегралы свертки и Дюамеля. Эти методы анализа дискретно воплотились в цифровых фильтрах БИХ и КИХ. Но существует частотный подход к анализу линейных динамических систем. Иногда его называют операторным. В качестве операторов используются преобразование Фурье, Лапласа и т.п. Далее мы будем говорить только о преобразовании Фурье. Данный метод анализа не получил широкого распространения при построении цифровых фильтров. Автору не удалось найти вменяемых практических рекомендаций по построению подобных фильтров на русском языке. Единственное краткое упоминание такого фильтра в практической литературе [Рабинер Л., Гоулд Б., Теория и применение цифровой обработки сигналов 1978], но в данной книге рассмотрение подобного фильтра очень поверхностно. В указанной книге данная схема построения фильтра называется: «свертка в реальном времени методом БПФ», что, по моему скромному мнению, совершенно не отражает сути, название должно быть коротким, иначе времени на отдых не останется. Реакция линейной динамической системы есть обратное преобразование Фурье от произведения изображения по Фурье входного сигнала x(t) на комплексный коэффициент передачи K(f): В практическом плане, данное аналитическое выражение предполагает следующий порядок действий: берем преобразование Фурье от входного сигнала, умножаем результат на комплексный коэффициент передачи, выполняем обратное преобразование Фурье, результатом которого является выходной сигнал. В реальном дискретном времени такой порядок действий выполнить невозможно. Как брать интеграл по времени от минус до плюс бесконечности?! Его можно взять только находясь вне времени… В дискретном мире для выполнения преобразования Фурье существует инструмент - алгоритм быстрого преобразования Фурье (БПФ). Именно его мы и будем использовать при реализации нашего Фурье-фильтра. Аргументом функции БПФ является массив временных отсчетов из 2^n элементов, результатом два массива длинной 2^n элементов соответствующие действительной и мнимой части преобразования Фурье. Дискретной особенностью алгоритма БПФ является то, что входной сигнал считается периодичным с интервалом 2^n. Это накладывает некоторые ограничения на алгоритм Фурье-фильтра. Если взять последовательность выборок входного сигнала, провести от них БПФ, умножить результат БПФ на комплексный коэффициент передачи фильтра и выполнить обратное преобразование …ничего получится!
Выходной сигнал будет иметь огромные нелинейные искажения в окрестности стыков выборок. Для решения этой проблемы необходимо применить два приема: Такие функции широко применяются в технике цифровой обработки сигналов, и называть их принято - окнами. По скромному мнению автора лучшим, с практической точки зрения, является окно имени Хана: На рисунке приведены графики иллюстрирующие свойства окна Хана длинной 2^n=256. Экземпляры окна построены с половинным перекрытием k=128. Как видно все оговоренные выше свойства имеются в наличии. По просьбам трудящихся, на следующем рисунке приведена схема вычислений Фурье-фильтра, при длине выборки 2^n=8, количество выборок 3. На подобных рисунках очень сложно отобразить процесс вычислений, особенно тяжело показать его цикличность, поэтому мы и ограничились количеством выборок равным трем. Входной сигнал разбивается на блоки длинной 2^n=8 с перекрытием 50%, от каждого блока берется БПФ, результаты БПФ подвергаются нужной трансформации, берется обратное БПФ, результат обратного БПФ скалярно умножается на окно, после умножения блоки складываются с перекрытием. При выполнение трансформаций спектра, не стоит забывать о главном свойстве массива БПФ действительных сигналов, первая половина массива БПФ комплексно сопряжена со второй половиной, т.е Re[i]=Re[(1< Теперь мы знаем все, что необходимо для написания алгоритма Фурье-фильтра. Опишем алгоритм на языке С. #include Вызывая функцию FureFilter() с частотой FSempl и передавая ей в качестве аргумента входной сигнал, результатом получим выходной сигнал. В данном примере входной сигнал обрабатывается следующим образом: сигнал пропускается через полосовой фильтр с частотами среза FsrLow, FsrHi, подавляются все спектральные составляющие выше и ниже указанных частот, сдвигается спектр сигнала (для звуковых сигналов это воспринимается как эффект Буратино-Карабаса), амплитудный спектр сигнала подвергается сглаживанию фильтром низких частот (для звука это эффект гулкого помещения). Данные действия с сигналом выполнены в качестве примера, для того чтобы показать технические приемы обработки сигнала в частотной области, такие как: соблюдение комплексно-сопряженности коэффициентов, восстановление комплексного спектра по амплитудному, не используя тригонометрических функций и т.п. Заключение
Стоит отметить, что, скорее всего, данная функция Фурье-фильтра, на практике окажется неработоспособна. При вызове данной функции даже с невысокой частотой 8000Гц, она не успеет выполнится к моменту следующего вызова, не хватить быстродействия. Данный программный код Фурье-фильтра приведен в качестве описания алгоритма, без привязки к конкретным аппаратным ресурсам, и имеет чисто образовательные цели
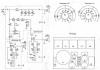
(см. Введение). При практической реализации следует распараллелить выполнение функции заполнения-опорожнения буфера BufInOut (лучше сразу ПДП и т. п.) и функции обработки буфера ObrBuf(), но это уже совсем другая история. В статье описан небольшой анализатор аудиоспектра (0 - 10 кГц), состоящий из ЖК-дисплея 16x2 и микроконтроллера ATmega32. Используется простой алгоритм ДПФ (Дискретное Преобразование Фурье). БПФ (Быстрое Преобразование Фурье) отличается от ДПФ только большей скоростью но и более сложным алгоритмом. ДПФ медленный по сравнению с БПФ. Данный ЖК анализатор спектра не требует большой скорости, которую может обеспечить БПФ, и если изображение на экране будет меняться с частотой около 30 кадров / сек, то это более чем достаточно для визуализации звукового спектра. Для ЖК-дисплея не рекомендуется слишком высокая частота обновления. Звук с частотой дискретизации 20 кГц даёт 32 точки ДПФ. Поскольку результат преобразования симметричен, мне нужно использовать только первые 16 результатов. Соответственно максимальная частота 10 кГц. Таким образом, 10кГц/16 = 625Гц. Можно увеличить скорость вычисления ДПФ. Если есть точка N ДПФ, то необходимо найти синус и косинус (N ^ 2) / 2. Для 32-точечного ДПФ, необходимо найти синус и косинус 512. Прежде чем искать синус и косинус, нам нужно найти угол (градусы), который занимает некоторое время процессора. Для ускорения этого сделаны таблицы для синуса и косинуса. Синус и косинус сделаны 16-битными переменными, умножив значения синуса и косинуса на 10000. После преобразования нужно разделить каждый результат на 10000. Теперь можно рассчитать 120 32-точечных ДПФ в секунду, что более чем достаточно для анализатора спектра. Для отображения столбиков использованы пользовательские символы для ЖК-дисплея, загруженные в 64 Байт встроенной памяти дисплея. Одной из наиболее важных частей анализатора спектра является получение сигнала с электретного микрофона. Особое внимание должно быть уделено разработке предварительного усилителя для микрофона. Нам нужно установить нулевой уровень на входе АЦП и максимальный уровень равный половине напряжения питания, т.е. 2,5В. На него может подаваться напряжение от -2,5В до +2,5В. Предусилитель должен быть настроен так, чтобы не превышать этих границ. В схеме использован операционный усилитель LM324 в качестве предварительного усилителя для микрофона. В качестве устройства отображения используется двухстрочный символьный ЖК индикатор. Основным моментом при реализации данного проекта является не аппаратная часть, а программная, точнее реализация дискретного преобразования Фурье (ДПФ) на 8-разрядном микроконтроллере. Сразу следует отметить, что автор не является экспертом в этой области и поэтому начал с основ - с простого дискретного преобразования Фурье. Алгоритм быстрого преобразования Фурье является не только быстрым, но и достаточно сложным. Дискретное преобразование Фурье (в англоязычной литературе DFT, Discrete Fourier Transform) - это одно из преобразований Фурье, широко применяемых в алгоритмах цифровой обработки сигналов (его модификации применяются в сжатии звука в MP3, сжатии изображений в JPEG и др.), а также в других областях, связанных с анализом частот в дискретном (к примеру, оцифрованном аналоговом) сигнале. Дискретное преобразование Фурье требует в качестве входа дискретную функцию. Такие функции часто создаются путем дискретизации (выборки значений из непрерывных функций). Принципиальная схема анализатора спектра звукового сигнала очень проста и условно ее можно разделить на цифровую часть и аналоговую. Цифровая часть образована микроконтроллером и подключенным к нему ЖК индикатором. Микроконтроллер тактируется от кварцевого резонатора 16 МГц, в качестве опорного напряжения для АЦП микроконтроллера используется напряжение питания +5 В. Микроконтроллер работает от внешнего кварцевого резонатора 16 МГц. Аналоговая часть устройства - это самая важная часть и представляет собой предварительный усилитель сигнала электретного микрофона, выход которого подключается к каналу ADC0 встроенного в микроконтроллер АЦП. Уровень нуля на входе АЦП нам необходимо установить равным точно половине опорного напряжения, т.е. 2.5 В. В этом случае мы сможем использовать положительную и отрицательную полуволну сигнала, но его амплитуда не должна превышать установленный предел, т.е. коэффициент усиления должен быть точно настроен для предотвращения перегрузки. Всем вышеуказанным условиям отвечает распространенная микросхема низкопотребляющего операционного усилителя . Алгоритм ДПФ несколько медленнее в сравнении с быстрым преобразованием Фурье. Но наш анализатор спектра не требует высокой скорости, и если он способен обеспечить скорость обновления около 30 кадров в секунду, этого будет более чем достаточно для визуализации спектра звукового сигнала. В любом случае, в нашем варианте возможно достичь скорости 100 кадров в секунду, но это уже слишком высокое значение параметра для двухстрочного символьного ЖК индикатора и оно не рекомендуется. Частота дискретизации равна 20 кГц для 32 точечного дискретного преобразования Фурье и поскольку результат преобразования симметричен, нам нужно использовать только первую половину, т.е. первые 16 результатов. Следовательно, мы можем отображать частотный спектр в диапазоне до 10 кГц и разрешение анализатора составляет 10 кГц/16 = 625 Гц. Автором конструкции были предприняты попытки увеличения скорости вычисления ДПФ. Если это преобразование имеет N точек, то мы должны найти N2/2 значений синуса и косинуса. Для нашего 32 точечного преобразования необходимо найти 512 значений синуса и косинуса. Но, прежде чем найти их нам необходимо вычислить угол (градусы), что займет некторое процессорное время, поэтому было решено использовать для этих вычислений таблицы значений. При расчетах в программе микроконтроллера не используются вычисления с плавающей точкой и числа двойной точности (double), так как это займет больше времени на обработку на 8-разрядном микроконтроллере. Вместо этого значения в таблицах поиска используются 16-разрядные данные целочисленного типа (integer), умноженные на 10000. Затем после выполнения преобразования результаты делятся на 10000. При таком подходе имеется возможность выполнять 120 32-точечных преобразований в секунду, что более чем достаточно для нашего устройства. Демонстрация работы анализатора спектра на микроконтроллере ATmega32
Загрузки
Исходный код (программа микроконтроллера, таблицы данных синуса, косинуса и угла) - Все сигналы, независимо от того, вы их придумали или наблюдали во Вселенной, на самом деле просто сумма простых синусоид различных частот.
Я сделал небольшой аудио анализатор спектра (0 - 10 кГц) из ЖК-дисплея 16x2 и микроконтроллера ATmega32. Я начал с простых ДПФ (Дискретное Преобразование Фурье). БПФ (Быстрое Преобразование Фурье) отличается от ДПФ только большей скоростью и немного более сложным алгоритмом, я не стал его использовать, возможно я добавлю его позже. ДПФ медленный по сравнению с БПФ. Мой ЖК анализатор спектра не требует большой скорости, которую может обеспечить БПФ, и если изображение на экране будет меняться с частотой около 30 кадров / сек, то это более чем достаточно для визуализации звукового спектра. Но я итак могу достичь частоты около 100 кадров / сек, однако для ЖК-дисплея не рекомендуется слишком высокая частота обновления. Звук с частотой дискретизации 20 кГц даёт 32 точки ДПФ. Поскольку результат преобразования симметричен, мне нужно использовать только первые 16 результатов. Соответственно максимальная частота 10 кГц. Таким образом, 10кГц/16 = 625Гц. Я пытался увеличить скорость вычисления ДПФ. Если есть точка N ДПФ, то необходимо найти синус и косинус (N ^ 2) / 2. Для 32-точечного ДПФ, необходимо найти синус и косинус 512. Прежде чем искать синус и косинус, нам нужно найти угол (градусы), который занимает некоторое время процессора. Для этого я сделал таблицы для синуса и косинуса. Я сделал синус и косинус 16-битными переменными, умножив значения синуса и косинуса на 10000. После преобразования я должен разделить каждый результат на 10000. Теперь я могу рассчитать 120 32-точечных ДПФ в секунду, что более чем достаточно для анализатора спектра. Я использовал пользовательские символы для ЖК-дисплея загруженные в 64 Байт встроенной памяти ЖК-дисплея. В интернете я увидел видео, где ЖК-дисплей 16х2 используется в качестве дисплея анализатора спектра и использовал эту идею. Одной из наиболее важных частей анализатора спектра является получение сигнала с электретного микрофона. Особое внимание должно быть уделено разработке предварительного усилителя для микрофона. Нам нужно установить нулевой уровень на входе АЦП и максимальный уровень равный половине напряжения питания, т.е. 2,5В. На него может подаваться напряжение от -2,5В до +2,5В. Предусилитель должен быть настроен так, чтобы не превышать этих границ. Я использовал операционный усилитель LM324 в качестве предварительного усилителя для микрофона. ATmega32
100 Ом
LM324
220 кОм
10 кОм
1 кОм
Количество символов в тексте обычно мало кого интересует. Но, случаются ситуации, когда без этой информации не обойтись. Например, если вы готовите материал для публикации, то вас могут ограничить определенным количеством символов.
В данной статье...
На вашем рабочем столе слишком много открытых окон? Хотите быстро перескакивать между ними или, например, развернуть одно и свернуть другое? Или, может, просто хотите сфокусироваться и раскрыть окно на весь экран? Для каждого из этих действий есть...
На росте курсов криптовалют и все большей их популяризации многие люди хотят начать майнить. Кто-то уже собрал ферму на видеокартах, нашлись те, кто предпочёл фермам майнеры ASIC. Но наверняка остались и те, кто ещё не определился на чем строить...



![]()



Дисплей
Аудио вход

Шина данных ЖК индикатора подключена к порту C микроконтроллера (линии ввода/вывода PC0-PC3), шина управления подключена к порту D(PD5, PD6) микроконтроллера. Индикатор работает в 4-битном режиме. Переменный резистор номиналом 4.7 кОм используется для регулировки контрастности. Для работы с индикатором были созданы пользовательские символы для отображения 8 горизонтальных столбиков анализатора, эти пользовательские символы занимают все 64 Байта ОЗУ ЖК индикатора.

Дисплей
Аудио вход


Список радиоэлементов
Обозначение
Тип
Номинал
Количество
Примечание
Магазин
Мой блокнот
Дисплей
МК AVR 8-бит
1
В блокнот
Конденсатор
22 пФ
2
В блокнот
Конденсатор
0.1 мкФ
1
В блокнот
Электролитический конденсатор
100 мкФ
1
В блокнот
Резистор
1
В блокнот
Подстроечный резистор
4.7 кОм
1
В блокнот
Кварцевый резонатор
16 МГц
1
В блокнот
LCD-дисплей
16х2
1
В блокнот
Блок питания
5 В
1
В блокнот
Аудио вход
U1
Операционный усилитель
1
В блокнот
С1
Конденсатор
1 мкФ
1
В блокнот
С8
Конденсатор
0.01 мкФ
1
В блокнот
R1
Резистор
1
В блокнот
R2, R3
Резистор
2
В блокнот
R4, R9
Резистор
2
В блокнот
R5
Резистор