Программные блоки панели "Действия" были рассмотрены в предыдущих частях обзора, а в данной статье я расскажу о блоках со вкладки "Управление операторами".
Эти блоки можно представить в качестве "регулировщиков" программы: они прикажут остановиться и продолжить движение программы, перейти на соседнюю ветку или идти по кругу.
По сравнению с NXT было добавлено 2 новых блока:
- Начало - в NXT начало программы было единым и задавалось сразу при открытии программы.
- Прерывание цикла - в NXT такого блока просто не было. Если требовалось реализовать похожий функционал, то приходилось использовать переменные.
- Начало
- Ожидание
- Переключатель
- Прерывание цикла

Блок "Начало"
Возможно, вы обратили внимание на то, что первый блок всех EV3 программ - блок с зеленой стрелкой. Этот блок - "Начало". Без него не обойдется ни одна программа - именно с него и начинается выполнение команд. Если перед последовательностью блоков не поставить "Начало", то такая программа выполняться не будет.
Например, по программе, представленной ниже, робот будет кружится вокруг оси (будет выполняться верхняя последовательность действий), но не будет проигрывать аудио файлы и зажигать подсветку кнопок (нижняя последовательность без блока "Начало" не активна):

EV3 поддерживает многозадачность, т.е. программа может содержать больше одной последовательности команд. Причем эти последовательности могут иметь свой собственный блок "Начало" или выходить из одного "Начала":
Все такие последовательности будут выполняться одновременно.
Замечу, что зеленая стрелка на блоке - это не декоративный элемент. Если блок подключен к компьютеру (неважно как: через usb, wi-fi или bluetooth), то нажатие на стрелку запустит данную последовательность на выполнение.
Блок "Ожидание"
Этот блок тоже является одним из самых используемых. На нем программа "зависает" - последующие блоки программы не выполняются - и ждет определенное количество времени или определенного значения датчика.
У "Ожидание" большое число режимов, которое может испугать:

Но, на самом деле, все довольно просто. Все режимы можно разделить на категории:
- по времени - блок ждет указанное количество секунд, прежде чем начнет выполнять следующие блоки
- по показанию датчика:
- сравнение - блок ожидает конкретное показание датчика, указанное в блоке
- изменить - блок ожидает, когда показание датчика изменится на указанную величину, по сравнению с начальным значением. Причем, можно выбрать не только размер величины, но и ее направление - убывание значения, его увеличение или в любую сторону.
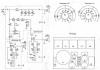
В первой программе изменяется подсветка кнопок. Одну секунду подсветка будет гореть зеленым, затем 1 секунду красным и после этого переключится на стандартный режим - мигающий зеленый:

Вторая программа представляет из себя начало классического решения в соревновании "Кегельринг": робот кружится вокруг своей оси до тех пор, пока не увидит перед собой банку:

Следующая программа включает мотор А, и после того, как он сделает 5 оборотов, выключает его:

Работа этого блока с bluetooth ничем не отличается от работы с любым сенсором. Например, следующая программа ожидает сообщения "HI" и после этого зажигает подсветку зеленым и проигрывает звуковой файл:

Это особый блок - внутрь его можно вставлять другие блоки. Блоки, находящиеся внутри, будут повторяться. Режимы блока "Цикл" задают способ, который определяет, когда цикл должен завершиться. Большинство этих режимов мы уже знаем по предыдущему блоку ожидания, однако добавилось несколько новых:
- Неограниченный - такой цикл будет выполняться, пока не будет принудительно завершена программа
- Подсчет - цикл будет повторяться заданное число раз
- Логическое значение - цикл будет повторяться, пока заданное значение не будет истиной
- Время - цикл будет повторяться заданное время
- Показание датчика:
- сравнение - цикл будет повторяться, пока датчик не примет заданное значение
- изменить - цикл будет повторяться, пока показание датчика не изменится на указанную величину, по сравнению с начальным значением.
Рассмотрим примеры. По этой программе робот будет ехать прямо и поворачивать, до тех пор, пока программу не остановят (используется бесконечный цикл):

Следующая программа использует датчик касания. Пока он не нажат, робот вращает средним мотором сначала по часовой, потом против часовой стрелки. После нажатия на датчик мотор останавливается:

Цикл со счетчиком позволяет проиграть ноту 10 раз:

С режимом логического значения придется использовать еще не изученные блоки опроса датчиков. Данная программа заставляет робота ехать вперед до тех пор, пока он не увидит предмет на расстоянии, меньше 20 см (первый блок цикла) или не наткнется на препятствие датчиком касания (второй блок цикла). Результат логической операции "ИЛИ" дает третий блок цикла:

Блок "Переключатель"
Аналогичный блок есть и в NXT, он позволяет в зависимости от значения переменной или показания датчика выполнять разные последовательности действий.
После выполнения данной последовательности действий, программа выполняет блоки, идущие за "Переключателем".
Режим данного блока определяет, значение какого датчика или переменной будет использоваться. Используются все те же режимы, что и блок "Цикл": можно использовать любой датчик (цвета, гироскопический, инфракрасный, ультразвуковой, вращения мотора и другие), числовое или текстовое значение, сообщение bluetooth.
Например, по данной программе робот сначала будет вращаться вокруг своей оси 5 оборотов мотора, а затем, в зависимости от показаний датчика гироскопа, ехать вперед или назад. Если угол, определяемый гироскопом, будет меньше 90 градусов, тогда робот поедет вперед. Если же угол меньше 90 градусов - тогда робот поедет назад.

Следующая программа представляет собой реализацию простейшего релейного регулятора для движения по черной линии:

В обоих предыдущих примерах блок "Переключатель" содержал только 2 варианта развития событий. Но на самом деле, данный блок может иметь и больше вариантов. Например, если робот будет определять цвет предмета, то он может выбирать из куда большего числа вариантов:

В этой программе робот определяет красный, синий, зеленый и отсутствие цвета. Он будет называть цвета, а также для красного и зеленых цветов включать подсветку кнопок, а по синему цвету поедет вперед. Можно добавить оставшиеся цвета, которые может определить датчик - черный, желтый, белый, коричневый - с помощью маленькой кнопки "+", расположенной у верхнего варианта (она обведена красным).
При большом количестве вариантов (как в примере выше) блок "Переключатель" становится довольно громоздким и работать с ним не удобно. В этом случае блок можно переключить в "плоский режим":

Кнопка, переключающая режимы "плоский / подробный", обведена красным.
Блок "Прерывание цикла"
Этот блок новый, в NXT подобного блока не было. Он позволяет выходить из цикла - оставшиеся блоки цикла выполняться не будут, и программа перейдет к блокам после цикла. В "шапке" блока задается имя цикла, который должен быть завершен.
Например, цикл в программе должен повториться 5 раз, но если расстояние до предмета станет больше 50 сантиметров, то произойдет досрочный выход из цикла и робот проиграет звуковой тон:

Особенностью данного блока является то, что он не обязательно должен находится внутри прерываемого цикла. Например, следующая программа выводит число повторений цикла до тех пор, пока яркость отраженного света больше 50. Но если в процессе выполнения программы будет нажат датчик касания, то цикл прекратится и программа остановится:
Если вам нравится графическая среда программирования Scratch 2.0, то вам необязательно отказываться от неё для программирования роботов Lego Mindstorms EV3. Достаточно лишь установить и настроить нужное программное обеспечение, о чём и будет написано в этой статье.
Статья будет рассчитана на владельцев компьютеров под управлением Windows, хотя всё упомянутое в статье программное обеспечение можно установить и использовать на компьютерах под управлением Mac OS , Mac OS X и Linux. Вот вкратце план, по которому мы будем действовать:
Подготовка SD-карты
Прежде, чем начинать, что то делать дальше, нужно найти подходящую SD-карту , удалить с неё все лишние разделы, которые там могут оказаться, и отформатировать её. Это должна быть карта объёмом как минимум 2Гб , но не более 32Гб (SDXC-карты не поддерживаются модулем EV3). Файловая система на карте должна быть FAT32. Разработчики leJOS рекомендуют форматировать карту с помощью программы SD Card Formatter . Ведь, даже если вы решили использовать только что купленную карту памяти, на ней могут быть скрытые разделы, которые могут вызвать проблемы при работе c EV3. Однако, если ваша SD-карта меньше 4Гб, то программа автоматически выбирает файловую систему FAT и изменить в настройках это нельзя, поэтому после форматирования программой SD Card Formatter форматируйте такие карты в формат FAT32 другим способом. Кроме того, у меня при использовании старых карт 2Гб , leJOS EV3 вообще отказался загружаться, хотя установка прошла успешно. Из своего опыта я советую вам использовать свежекупленные карты SDHC объёмом 4 – 32Гб (у меня всё успешно работает с картой SDHC объёмом 4Гб класс 4 производства smartbuy ).
Установка компонентов leJOS EV3 на компьютер
leJOS – это крошечная виртуальная Java-машина , которая в 2013 году была адаптирована для работы с системой Lego Mindstorms EV3 . Официальная страничка проекта находится . Для компьютеров под управлением Windows разработчики сделали дистрибутив, в котором есть утилита для подготовки SD-карты , документация и примеры.
Итак, установим leJOS EV3 на компьютер:
- Скачайте последнюю версию leJOS EV3 0.9.0-beta ). Для установки на Windows – это будет файл leJOS_EV3_0.9.0-beta_win32_setup.exe .
- Запустите скачанный дистрибутив на вашем компьютере. Вы увидите приветствие. Нажмите «Next > ».

- На этом шаге выберите JDK (Java Development Kit ), который вы будете использовать. Рекомендуется использовать Java 7 или 8 . Однако для использования Java 8 вам нужно будет создать подходящий компактный профиль Java, поэтому Java 7 будет использовать проще, что мы и сделаем. Если JDK у вас не установлен, щёлкните по кнопке «Download JDK » и, после перехода на сайт Oracle, скачайте подходящий JDK и установите его на компьютер. Нажмите кнопку «Next > ».

- На следующем шаге вы можете выбрать путь для установки или оставить его без изменений. Нажмите «Next > ».
- На следующем шаге вы увидите список устанавливаемых компонентов. Рекомендуется установить все компоненты. Нажмите «Next > ».

- На следующем шаге вы сможете выбрать альтернативные пути для установки выбранных компонентов. Здесь можно оставить всё по умолчанию и нажать «Next > ».
- На следующем шаге выбирается имя папки в меню «Пуск ». Нажмите «Next > ».
- На последнем шаге щёлкните «Install».
- Если на вашем компьютере установлена предыдущая версия leJOS EV3 , то вы увидите предупреждение, см. картинку. Нажмите «OK», чтобы удалить предыдущую версию с компьютера.

- После установки вы увидите финальное окно. Здесь можно поставить галочку «Launch EV3SDCard utility », чтобы сразу при выходе из мастера запустить утилиту подготовки SD-карты.

Нажмите кнопку «Finish» с установленной галочкой «Launch EV3SDCard utility » после установки компонентов leJOS EV3 на компьютер или запустите утилиту вручную, для этого запустите файл ev3sdcard.bat , который находится в папке bin, внутри папки, в которую вы установили leJOS EV3 (у меня это папка «C:\Program Files\leJOS EV3\bin »). После запуска у вас должно появиться окошко, изображённое на картинке снизу.
В верхнем поле нужно выбрать букву диска вашей карты, у меня это диск I: . В поле ниже указывается файл с образом leJOS и по умолчанию у вас уже должен быть прописан правильный путь, см. картинку сверху. Этот файл можно найти в папке, куда были установлены компоненты leJOS EV3 (у меня это «C:\Program Files\leJOS EV3 »). В самом нижнем поле нужно выбрать файл со средой выполнения Java, который вам предварительно нужно скачать с сайта Oracle отсюда (убедитесь, что вы выбрали Java 7 JRE , а не Java 8 SDK , если конечно вы не планируете создавать компактный профиль Java 8 ). Для скачивания вам нужно будет зарегистрироваться, если вы этого ещё не делали.

Когда все поля будут заполнены, нажмите на кнопку «Create», и после того как на SD-карту будут скопированы необходимые файлы вы увидите подобное сообщение:

Нажмите «OK», затем закройте окно программки и безопасно извлеките карту из компьютера. Затем вставьте её в выключенный модуль EV3 и включите его, нажав центральную кнопку. Вы должны будете увидеть логотип leJOS EV3 и прогресс форматирования и установки образа SD-карты . Это занимает порядка 8-ми минут. В конце этого процесса модуль EV3 перегрузится и вы должны увидеть меню leJOS EV3 .

В дальнейшем, при включении модуля EV3 со вставленной SD-картой leJOS EV3 у вас сразу начнётся загрузка leJOS EV3 , а без SD-карты загрузится стандартное ПО LEGO.
Установка Adobe AIR на компьютер
Перед установкой офлайн редактора Scratch, необходимо обновить или установить на компьютер последнюю версию Adobe AIR . Описывать установку я не буду, она очень простая. Нужно скачать инсталлятор , запустить его, ответить на несколько вопросов и дождаться окончания установки.
Теперь скачайте и установите на компьютер последнюю версию офлайн редактора Scratch 2 (на момент написания статьи – это версия 437, файл Scratch-437.exe ). У инсталлятора очень мало параметров, см. картинку. Уберите галочку «Запустить приложение после установки » и нажмите кнопку «Продолжить ».

После установки вы увидите следующее сообщение, см. картинку. Щёлкните по кнопке «Готово ».

Установка приложения ev3-scratch-helper-app на компьютер
Следующее что нужно сделать – установить приложение-помощник ev3-scratch-helper-app на ваш компьютер, которое делает возможным взаимодействие Scratch с модулем EV3 (прочитать про приложения-помощники для Scratch можно ). Установку можно произвести двумя способами:
- Если у вас на компьютере установлен git, то вы можете клонировать проект, выполнив в консоли команду «git clone https://github.com/koen-dejonghe/ev3-scratch-helper-app.git ». Этот способ предпочтительнее, но, если вы не знаете, что такое git, то есть второй способ.
- Скачайте и распакуйте zip-архив с проектом (я выбрал этот вариант). Папку ev3-scratch-helper-app-master внутри zip-архива я распаковал на диск C: .
В папке «scratch» внутри папки установки вы можете найти файл «ev3-helper-app.s2e » для английского и файл «ev3-helper-app-NL.s2e » нидерландского языков, соответственно, в папках «en» и «nl». Если вы хотите использовать русский язык, то вы можете самостоятельно перевести файл «ev3-helper-app.s2e » (кодировка файла д.б. UTF-8 ) или взять файл «ev3-helper-app-RU.s2e » с моим переводом (файл «ev3-helper-app-RU.s2e » сохраните по аналогии с английской и нидерландской версией: сделайте папку «ru\extensions » и сохраните в ней). К сожалению, перевести можно лишь названия блоков, но не значений, иначе приложение ev3-scratch-helper-app работать не будет. Т.е. название моторов и датчиков останется на английском (для моторов это «Large» и «Medium», для датчиков – «Color», «Distance» и «Touch» и т.д.).
| Русификация приложения ev3-scratch-helper-app Версия:от 07.08.2015 | |
Файл ev3-helper-app-RU.s2e для русификации блоков EV3 в офлайн редакторе Scratch 2. |
|
| 07.08.2015 3.76 KB 1428 |
В папке с приложением вы можете найти файл «application.properties » с настройками. Измените настройки, если потребуется. Имена свойств говорят сами за себя, поэтому расписывать их здесь я не буду. После изменения, удостоверьтесь, что значение свойства «server.port » в файле «application.properties » равно значению переменной «extensionPort » в файле «ev3-helper-app.s2e » или «ev3-helper-app-RU.s2e », в зависимости от того, файл какого языка вы будете использовать.
Запуск приложения ev3-scratch-helper-app
Перед запуском редактора Scratch 2 у вас всегда должно быть запущено приложение ev3-scratch-helper-app . Для его запуска сделайте следующее:
- Запустите окно консоли и поменяйте текущую папку на папку, в которой установлено приложение ev3-scratch-helper-app . У меня это папка «C:\ev3-scratch-helper-app », поэтому я вызвал команду «cd C:\ev3-scratch-helper-app ».
- Выполните команду «gradlew.bat bootRun ». При первом выполнении к вам на компьютер будут скачаны и установлены необходимые библиотеки, поэтому удостоверьтесь, что компьютер подключен к Интернету. Первый запуск займёт продолжительное время, наберитесь терпения.
После того как приложение запустится вы увидите в консоли примерно следующие сообщения:
2015-08-06 09:15:28.699 INFO 10236 --- s.b.c.e.t.TomcatEmbeddedServletContainer: Tomcat started on port(s): 4321/http 2015-08-06 09:15:28.704 INFO 10236 --- scratch.ev3.Application: Started Application in 13.411 seconds (JVM running for 15.025)
Для последующих запусков для удобства можно создать ярлык, например, на рабочем столе. Вот так выглядят свойства ярлыка для установленного приложения в папке «C:\ev3-scratch-helper-app »:

При запуске приложение ev3-scratch-helper-app подключается к первому доступному модулю EV3 в сети. Если ни один модуль не обнаружен, то приложение ждёт, пока такой появится.
Первый запуск офлайн редактора Scratch 2
После запуска редактора Scratch 2 первый раз (у вас должен быть ярлык «Scratch 2 » на рабочем столе) вы, возможно захотите поменять язык на русский. Выбор языка выполняется из меню с изображением глобуса, см. картинку.

Добавление программных блоков EV3 в редактор Scratch 2
После запуска у вас автоматически создаётся новый пустой проект. Теперь для этого проекта нужно импортировать блоки EV3, для этого удерживая клавишу «Shift» щёлкните по меню «Файл -> Импортировать экспериментальное расширение HTTP » и выберите файл ev3-helper-app.s2e или ev3-helper-app-RU.s2e , в зависимости от предпочитаемого языка. Я выбрал файл «C:\ev3-scratch-helper-app-master\scratch\ru\extensions\ev3-helper-app-RU.s2e ». Эту процедуру нужно будет делать один раз для каждого нового проекта.

После этого откройте закладку «Скрипты » щёлкните по «Другие блоки » и удостоверьтесь, что здесь появились наши блоки. Проверку наличия блоков желательно делать каждый раз после открытия ранее сохранённого проекта. Зелёный кружочек справа от названия «EV3HelperApp » означает, что приложение v3-scratch-helper-app выполняется. Если кружочек красный, то это значит, что приложение v3-scratch-helper-app не выполняется и его нужно запустить.

Подключение модуля EV3 к компьютеру
Подключить модуль EV3 к компьютеру можно двумя способами: через Bluetooth или WiFi.
Для подключения через WiFi у вас должен быть USB WiFi адаптер. leJOS EV3 поддерживает адаптеры с чипсетами Atheros ATH9K и Realtex 8192cu . Модуль EV3 протестирован разработчиками с адаптерами NetGear WNA1100 и EDIMAX EW-7811Un , но и другие адаптеры могут поддерживаться, если в них используется один из перечисленных чипсетов. Здесь я не буду рассматривать подключение через WiFi, т.к. не у всех есть подходящий адаптер. Но если вы заинтересовались таким подключением, то вы можете узнать, как это сделать из официального источника .
Для подключения через Bluetooth вам нужно сначала подключить друг к другу модуль EV3 и компьютер, а затем сделать личную сеть Bluetooth (PAN).
Подключение модуля EV3 к компьютеру нужно сделать только один раз для пары «модуль EV3 – компьютер »:
1. В модуле EV3 в главном меню leJOS EV3
найдите пункт меню «Bluetooth»
и зайдите внутрь, нажав на кнопку центральную кнопку модуля EV3. Если вы увидите надпись «Visibility on
», то всё в порядке: видимость модуля включена. Если вы видите надпись «Visibility off
», то найдите пункт меню «Visibility»
(с изображением глаза) и нажмите на центральную кнопку модуля EV3
дважды, чтобы включить видимость (надпись должна поменяться на «Visibility on
»).
2. На компьютере откройте «Панель управления -> Оборудование и звук -> Устройства и принтеры
». Вы увидите список устройств, подключенных к вашему компьютеру.

3. Удостоверьтесь, что Bluetooth компьютера включён, и нажмите сверху на кнопку «Добавление устройства ». Поднимется диалоговое окно, в котором через некоторое время должен появиться модуль EV3. Щёлкните по нему и затем щёлкните «Далее ».

4. На следующем шаге вы увидите выбор варианта подключения. Щёлкните по второму варианту и введите PIN-код 1234 .

После того как модуль EV3 и компьютер подключены друг к другу можно сделать личную сеть Bluetooth (PAN ) (подключение к сети PAN вам придётся делать каждый раз при включении модуля EV3):
- Откройте «Панель управления -> Сеть и Интернет -> Центр управления сетями и общим доступом » и щёлкните по «Изменение параметров адаптера » на левой панели окна.
- Вы должны увидеть здесь «Сетевое подключение Bluetooth » с красным крестиком. Щёлкните по этой иконке один раз, чтобы выбрать её.
- Щёлкните сверху по кнопке «Просмотр сетевых устройств Bluetooth ».
- Через некоторое время вы увидите в поднявшемся окне одну или несколько точек доступа. Щёлкните здесь по нашему устройству «EV3 », чтобы выбрать его, и щёлкните по пункту меню «Подключаться через -> Точка доступа ».

Программирование робота EV3 в редакторе Scratch 2
При программировании роботов EV3 с помощью редактора Scratch и расширения ev3-scratch-helper-app вам нужно помнить, что перед использованием моторов и датчиков их нужно подключить с помощью блоков «Подключить мотор к порту » и «Подключить датчик к порту » («Connect a motor to port » и «Connect a sensor to port » при использовании англоязычного варианта блоков). Отключаются датчики с помощью блока «Закрыть все порты » («Close all ports » в английском варианте).
Контролировать, что происходит в приложении ev3-scratch-helper-app , вы можете глядя на сообщения в консоли.
Для проверки, всё ли правильно мы настроили, соберите простейшую тележку, например, стандартную приводную платформу, и напишите для неё простейшую программу в Scratch 2 . Можете посмотреть примеры в папках «doc » и «scratch\en\demos » в папке установки программы ev3-scratch-helper-app . При открытии демонстрационных программ в Scratch 2 проверьте, есть ли блоки EV3 , как это было описано выше в разделе « ».
Инструкцию для сборки стандартной приводной платформы можете взять здесь:
| Инструкция для сборки стандартной приводной платформы Educator EV3 |


| Программа для Scratch 2 для тестирования взаимодействия с роботом EV3 Версия:от 07.08.2015 | |
Программа для Scratch 2 для тестирования взаимодействия с роботом EV3. |
|
| 07.08.2015 45.65 KB 1157 |
Итог
Из этой статьи вы узнали, как настроить офлайн редактор Scratch 2 для программирования роботов LEGO Mindstorms EV3 , а также узнали, как начать программировать с помощью него. К сожалению, в случае программирования в Scratch 2 модуль EV3 всё время должен быть подключен к компьютеру через Bluetooth или WiFi , т.е. он не автономен. Хотя здесь есть и приятные бонусы – роботом можно управлять с компьютера, например, робот на колёсах может управляться при помощи клавиш-стрелок или клавиш W, A, S и D. Итак, пробуйте, экспериментируйте и пишите, если что-то непонятно.
Вершиной творения компании Lego стал выпуск программируемых конструкторов LEGO Mindstorms Ev3. Игрушка предназначена для детей возрастом более десяти лет.
Сейчас mindstorms ev3 купить можно без особых проблем в специальных магазинах или в Интернете. Они легко программируются на выполнение определенных действий.
Установка среды программирования
Перед тем как начать писать команды для робота, нужно установить программное обеспечение.
Системные требования ПК для работы с lego mindstorms ev3:
- ОС Windows XP, 7, 8 или MacOs (10.6-10.8);
- 2Гб оперативки и 750 Мб на диске.
Устанавливая среду с помощью USB, выбираем версию для учителя или учащегося.
После установки создаем проект, который отображается в виде папки. В панели управления выбираем, что мы хотим создавать, программы или провести эксперимент. Эксперимент рекомендуют создавать для изучения работоспособности датчиков.
Программа управления роботом состоит из блоков, последовательных операций которые он исполняет, в свою очередь каждый отдельный блок имеет свой режим. Например, у блока управления мотором режимом является возможность останавливаться. Детально изучите все обозначения, которые нанесены на экран.
На экране размещено меню, в которое входят вкладки:
- действие;
- управление операторами;
- датчик;
- операции с данными;
- мои блоки и др.

С помощью данного меню можно запрограммировать робота на разные действия. Например, во вкладке, которая отвечает за действие разных механизмов, можно настроить режим мотора на движение, остановку или включение. Там можно задать время, количество и угол поворота.
В блоке «звук» можно запрограммировать робота на воспроизведение звуковых сигналов. Эти сигналы можно закачать или записать с помощью микрофона. Важным элементом управления программой является часть меню, которое управляет операторами. В нем вы можете управлять действием самой программы.
Здесь вы можете дать такие команды программе:
- начать ожидать;
- повторение цикла;
- переключиться между блоками;
- закончить цикл.
Lego mindstorms ev3 многозадачный, он вмещает несколько последовательностей команд. Вы можете запрограммировать не только свои действия в программу, но и их последовательность выполнения.
Комбинируя все возможные команды соответственного меню, вы можете создавать сложные траектории и типы поведения конструктора.
LEGO Education Mindstorms EV3: Программирование Роборуки (Robohand H25):
РОБОТОТЕХНИКА
Для детей 7-11 лет
ПОЧЕМУ РОБОТОТЕХНИКА?
Тотальная автоматизация и развитие искусственного интеллекта приведут к тому что многие профессии, в будущем будут не нужны. Везде, где машина может заменить человека - она его заменит. Самыми востребованными специалистами станут те, кто будут создавать и программировать эти машины. Дайте своему ребенку возможность попробовать себя в этой роли уже сейчас!
ЗАЧЕМ УЧИТЬСЯ
В КРАШПРО?
РАЗВИВАЕМ КОМПЕТЕНЦИИ
Творческое мышление
Проектное мышление м умение работать в команде
Развитие логики и мелкой моторики
Развитие математического мышления
Умение создавать автономных и управляемых роботов
Программирование в среде Scratch
Сначала мы позвали самых крутых IT Специалистов, практиков, разработчиков. Потом, нашли опытных методистов, детских психологов и педагогов. Соединили знания первых с компетентностью вторых и получили образовательные курсы, аналогов которым нет на рынке!

Наргиз Асадова
Директор Школы профессий будущего "CRUSH PRO"
7-9 лет 9-11 лет
«Робототехника WeDo»
Занятия проходят 1 раз в неделю по 1,5 часа.
Каждый учебный год разделен на 3 модуля.
ПЕРВЫЙ ГОД ОБУЧЕНИЯ
Модуль 1
10 занятий по 1,5 часа
- Изучая животный мир, понимаем принципы работы таких механизмов как подъемный кран (жираф), вертолет (стрекоза), погрузчик (пеликан) и других.
- Собираем робот лягушки, аллигатора, обезьяны, льва и других животных. Программируем, настраиваем голосовое управление, изучаем базовые детали и узлы: шестеренки, шкивы и зубчатую передачу
10 занятий по 1,5 часа
- Строим модели самолета, подъемного крана, вертолета, манипулятора и других машин. Изучаем принцип работы механизмов, физику, используем уравнения и формулы для программирования.
- Создаем систему управления роботами
12 занятий по 1,5 часа
- Строим катапульту, дроид, круглых роботов, космолет и другие сложные машины
- Создаем станцию связи, космическую станцию, изучаем роботов, работающих в космос
ВТОРОЙ ГОД ОБУЧЕНИЯ
Занятие 1: Лифт-подъемный механизм. Знакомство с программой.
Занятие 2: Стрекоза. Обсуждение вопросов связанных с насекомыми.
Занятие 3: Лягушка. Обсуждение принципов работы датчиков. Изучение лягушки и построение модели.
Построение модели лягушки из блоков LEGO WeDo. Использование датчиков для запуска программы. Использование условного оператора в задаче программирования. Использование цикла в программе.
Занятие 4: Пеликан. Обсуждение разновидностей птиц, мест их обитания и строение.
Занятие 5: Аллигатор. Изучение систем шкивов и ремней (ременных передач).
Занятие 6: Лев. Изучение процесса передачи движения и преобразования энергии в модели.
Ознакомление с работой коронного зубчатого колеса в этой модели. Изучение льва, его строения, места обитания. Создание и испытание движущейся модели льва. Усложнение поведения путем добавления управление голосом и программирования воспроизведения звуков синхронно с движениями льва. Понимание того, как при помощи зубчатых колёс можно изменить направление движения. Понимание и использование числового способа задания звуков и продолжительности работы мотора.
Занятие 7: Лягушка. Знакомство с системой шкивов и ремней (ременных передач), работающих в модели.
Анализ влияния смены ремня на направление и скорость движения. Построение, программирование и испытание модели «Лягушка». Изучение процесса передачи движения и преобразования энергии в модели. Изучение кулачкового механизма, работающего в модели. Понимание основных принципов проведения испытаний и их обсуждение.
Занятие 8: Жираф. Изучение рычажного механизма. Создание и испытание модели жирафа из блоков LEGO WeDo.
Программирование соответствующего звукового сопровождения. Усложнение поведения за счет установки на модель датчика наклона. Построение и изучение сложного механизма. Изучение строения, местообитание жирафа. Занятие 9: Обезьяна. Изучение рычажного механизма и влияние конфигурации кулачкового механизма на ритм барабанной дроби.
Создание и испытание модели барабанящей обезьянки. Модификация конструкции модели путём изменения кулачкового механизма с целью изменения ритма движений рычагов. Программирование соответствующего звукового сопровождения, чтобы поведение модели стало более эффектным.
Занятие 10: Промежуточный тест. (теория, конструирование, практика)
Занятие 11: Самолет. Построение модели самолёта, испытание её движения и уровня мощности мотора.
Усовершенствование модели самолёта путём программирования звуков, зависящих от показаний датчика наклона. Понимание и использование принципа управления звуком и мощностью мотора при помощи датчика наклона. Изучение процесса передачи движения и преобразования энергии в модели.
Занятие 12: Нефтяная вышка. Понимание концепции и обсуждения свойств энергетических ресурсов на примере нефти масло.
Обсуждение роли двигателя внутреннего сгорания в промышленном развитии. Построение модели насоса из блоков LEGO WeDo. Использование датчика расстояния для построения системы управления. Использование кривошипного механизма для сборки насоса. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Создание программы в соответствии с алгоритмом, который добавляет и вычитает из фиксированного значения. Практическое использование операций сложения и вычитания до 10.
Занятие 13: Ветряк. Обсуждение типов возобновляемых источников энергии и способов их использования пример ветровой турбины.
Определение концепции скорости. Строительство модели ветряной мельницы из блоков LEGO WeDo. Обсуждение работы механизмов и их различных типов и их практических. Программирование структуры в соответствии с алгоритмом, который учитывает вращение винта мельницы. Использование показаний датчика расстояния для запуска математической операции. Использование добавления в задаче программирования. Использование деления при расчете передаточных чисел.
Занятие 14: Пожарная машина. Обсуждение вопросов, связанных с явлением сжигания.
Занятие 15: Вилочный погрузчик. Знание о конструкции и работе штабелера.
Обсуждение роли развития робототехники в промышленности и логистике. Строительство штабелера с блоками LEGO WeDo. Использование червячного механизма для сборки накопителя. Использование датчика наклона для создания системы управления укладчиком. Использование датчика наклона для программирования системы управления укладчиком. Использование условного оператора в задаче программирования
Занятие 16: Лифт. Понимание концепции простых машин на примере рычага и шкива
.
Понимание приложений простых машин в строительстве на других построениях. Понимание механизма работы лифта. Создание модели лифта с блоками LEGO WeDo. Использование двигателя и шкива для создания модели лебедки лифта. Использование компьютерной клавиатуры для программирования системы управления. Измерение и сравнение измерений времени с секундомером.
Занятие 17: Вертолет. Обсуждение источника вертолетного носителя.
Сравнение конструкции и эксплуатации самолета и вертолета. Строительство вертолетной модели от блоков LEGO WeDo. Использование вала для сборки вертолетного привода. Использование датчика наклона для создания системы управления вертолетом. Использование механизма для создания вертолетного привода. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Использование условных инструкций и программных циклов. Использование многопоточной программы.
Занятие 18: Манипулятор. Понимание влияния развития робототехники на деятельность человека.
Обсуждение принципов выбора строительных решений для специфики конкретных задач. Создание модели манипулятора из блоков LEGO WeDo. Использование датчика наклона для создания системы управления манипуляторами. Использование червячного механизма для создания захвата манипулятора. Использование датчика наклона для программирования системы управления манипуляторами. Использование многофункциональной программы. Использование математических операций (деление). Измерение и сравнение измерений времени с секундомером.
Занятие 19: Кран. Обсуждение принципов работы простых машин.
Знание конструкции и принципов работы крана. Построение модели крана из блоков LEGO WeDo. Использование зубчатого зацепления для сборки вращающейся крановой башни. Использование датчика наклона для создания системы управления краном. Использование датчика наклона для программирования системы управления краном. Использование условного оператора в задаче программирования.
Занятие 20: Промежуточный тест(теория, конструирование, практика)
Занятие 21: Соревнования.
Проверка на знания механизмов после прохождения всех 3 блоков. Проверка на использование блоков программирования. Проверка скорости конструирования. Проверка на правильность конструкции.
Занятие 22: Дройд. Понимание концепции и обсуждения свойств сигнализации, охранных систем.
Обсуждение роли датчиков в жизни человека. Построение модели друида из блоков LEGO WeDo. Использование датчика расстояния для построения охранной системы. Использование сложного углового механизма для работы охранной системы. Программирование структуры в соответствии с алгоритмом, который делает зависимость работы моторов и звуков от датчика расстояния.
Занятие 23: Катапульта. Изучение рычажного механизма.
Создание и испытание модели космической катапульты. Модификация конструкции модели путём изменения кулачкового механизма. Построение модели катапульты из блоков LEGO WeDo. Использование ремня для удержания. Использование датчика наклона для создания системы управления.
Занятие 24: Шагоход. Программирование структуры в соответствии с алгоритмом, который делает зависимость работы моторов и звуков от датчика расстояния.
Построение модели шагохода из блоков LEGO WeDo. Использование датчика расстояния для построения системы управления. Использование червячного механизма для сборки шагохода.
Занятие 25: Спутники. Изучение работы спутников земли.
Построение и изучение работы спутников земли. Использование датчика расстояния для построения системы управления. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния.
Занятие 26: Галактическая игра. Обсуждение принципов работы простых машин.
Изучение конструкции и принципов работы конвейера. Построение модели крана из блоков LEGO WeDo. Использование шинного зацепления для сборки вращающегося конвейера. Использование датчика наклона для создания системы управления скоростью и направлению вращения мотора. Использование условного оператора в задаче программирования.
Занятие 27: Знание о конструкции и работе многоколесного робота-марсохода.
Обсуждение роли развития робототехники в освоении других планет. Строительство марсохода из блоков LEGO WeDo. Использование червячного механизма для движения переднеприводного робота. Использование кубиков для движения робота как боковые колеса. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Конструирование модели. Написание для нее программы. Изучение соревнований.
Занятие 28: Круглые роботы. Знание о конструкции и работе круглого робота-лунохода.
Обсуждение роли развития робототехники в освоении других планет. Строительство лунохода из блоков LEGO WeDo. Использование червячного механизма для движения конструкции всего робота. Использование кубиков для движения робота как боковые колеса.
Занятие 29: Космолет. Обсуждение работы космолетов и ракет.
Сравнение конструкций ракеты и космолета. Строительство космолета из блоков LEGO WeDo. Использование сложного механизма в построении космолета. Использование датчика наклона для создания системы управления космолетом. Программирование соответствующего звукового сопровождения, чтобы поведение модели стало более эффектным. Программирование структуры в соответствии с алгоритмом. Использование условных инструкций и программных циклов
Занятие 30: Станция связи. Планирование и сборка станции связи.
Практическое использование изученных передач. Использование знаний о датчиков и моторов, для построение автоматизированной станции связи. Развитие навыков группового взаимодействия.
Занятие 31: Космическая станция. Закрепление полученных знаний в ходе блока обучения.
Построение выбранного роботизированного механизма из блоков Lego Wedo. Использование датчиков для управления. Использование изученных механизмов для сборки роботов для космоса, доработка. Практическое использование функций в скрипте, использование
Занятие 32: Итоговый тест.
Занятие 1: Робофутбол.
Занятие 2: Робофутбол.
Занятие 3: Робофутбол.
Управление роботом, полоса препятствий, мини заезд.
Занятие 4: Робофутбол.
Внутренние соревнования.
Занятие 5: Перетягивание каната
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 6: Перетягивание каната
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 7: Перетягивание каната
Занятие 8: Перетягивание каната
Внутренние соревнования.
Занятие 9: Шагающие роботы
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 10: Шагающие роботы
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 11: Шагающие роботы
Программирование, запуск программы.
Занятие 12: Шагающие роботы
Внутренние соревнования.
Занятие 13: Теннис роботов
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 14: Теннис роботов
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 15: Теннис роботов
Программирование, запуск программы.
Занятие 16: Теннис роботов
Внутренние соревнования.
Занятие 17: Кегельринг
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 18: Кегельринг
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 19: Кегельринг
Программирование, запуск программы.
Занятие 20: Кегельринг
Внутренние соревнования.
Занятие 21: Сумо
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 22: Сумо
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 23: Сумо
Программирование, запуск программы.
Занятие 24: Сумо
Внутренние соревнования.
Занятие 25: Траектория
Знакомство с правилами, создание модели робота в программе Lego Digital Designer
Занятие 26: Траектория
Сборка модели по собственной схеме, первая апробация, устранение недостатков.
Занятие 27: Траектория
Программирование, запуск программы.
Занятие 28: Траектория
Внутренние соревнования.
Занятие 29-31: Творческая номинация. Создание проекта
Занятие 32: Итоговый тест.
Занятие 1: Вводное занятие.
Знакомство с конструктором.
Конструирование модели подъемник. Изучат работу мотора. Познакомятся с ПО и запрограммируют подъемник на движение.
Занятие 2: Автоматические двери.
Дети сконструируют автоматические двери. Продолжат работать с большим мотором;
Продолжат изучать интерфейс ПО (блоки: начало, большой мотор, ожидание, цикл);
Занятие 3: Робот гимнаст.
Продолжат знакомиться с набором Lego EV3; Собирут модель «Робот-гимнаст»; Познакомиться с разными режимами большого мотора;
Продолжат изучать интерфейс ПО (блоки: начало, большой мотор, ожидание).
Занятие 4: Робот-пятиминутка.
Продолжат знакомиться с набором Lego EV3;
Соберут модель «Робот-пятиминутка»; Продолжат работать с большим мотором;
Продолжат изучать интерфейс ПО (блоки: начало, рулевое направление, ожидание, цикл);
Занятие 5: Мойщик пола. Продолжат знакомиться с набором Lego EV3; Соберут модель «Мойщик пола»;
Продолжат работать с большими моторами; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 6: Приводной бот. Узнают о понижающей передаче.
Продолжат знакомиться с набором Lego EV3; Соберут модель «Приводной бот»; Продолжат работать с большими моторами; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 7: Скоростной бот. Узнают о повышающей передаче.
Продолжат знакомиться с набором Lego EV3; Соберут модель «Скоростной бот»; Продолжат работать с большими моторами; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 8:Цветок.
Продолжат знакомиться с набором Lego EV3; Соберут модель «Цветок»; Познакомиться с понятием «коническая зубчатая передача». Продолжать изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 9: Ворота
Занятие 10: Промежуточный тест (теория, конструирование и программирование).
Занятие 11: Робот – погрузчик.
Продолжат знакомиться с набором Lego EV3; Соберут модель «Ворота»; Продолжат работать со средним мотором; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 12: Приводная платформа.
Продолжат знакомиться с набором Lego EV3;
Соберут модель «Приводная платформа EV3»; Продолжат работать с большими моторами; Продолжать изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 13: Ультразвуковой датчик.
Продолжат знакомиться с набором Lego EV3;
Соберут свою модель робота; Продолжат работать с ультразвуковым датчиком;
Продолжать изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран);
Занятие 14: Датчик цвета.
Продолжат знакомиться с набором Lego EV3;
Соберут свою модель робота; Познакомятся с работой датчика цвета; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 15: Датчик цвета.
Продолжат знакомиться с набором Lego EV3; Соберут свою модель робота; Познакомятся с работой датчика цвета;
Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 16: Гироскопический датчик.
Продолжат знакомиться с набором Lego EV3;
Соберут свою модель робота. Познакомятся с работой датчика цвета; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 17: Танцующий робот.
Продолжат знакомиться с набором Lego EV3;
Соберут свою модель робота; Продолжат изучать интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель); Придумают свою программу.
Занятие 18: Щенок. Повторят знания о датчиках;
Соберут свою модель робота; Познакомятся с работой датчика цвета;
Занятие 19: Робофутбол.
Познакомятся с регламентом соревнований;
Выявят сложные моменты в процессе подготовки; Создадут собственного робота; Научатся работать в программе Lego Commander;
З
анятие 20: Промежуточный тест (теория, конструирование и программирование).
Занятие 21: Шагающий робот.
Изучат механизм для создания шагающего робота. Повторят знания о датчиках;
Соберут модель робота; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 22: Шагающий робот.
Продолжат изучение механизма для создания шагающего робота. Повторят знания о датчиках;
Соберут модель робота «муха»; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 23: Рисовальщик.
Повторят знания о траектории; Соберут модель робота;
Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель);
Занятие 24: Декор яиц.
Повторят знания о траектории;
Соберут модель робота; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель); Запрограммируют робота для декора яиц.
Занятие 25: Сортировщик цветов (мини)
.
Занятие 26: Перемещатель.
Повторят знания о датчике цвета; Соберут модель робота; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель, знакомство с блоками математики и переменных);
Занятие 27: Контейнер для шаров.
Повторят знания о датчике цвета;
Соберут модель робота; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель, знакомство с блоками математики и переменных);
Занятие 28:Контейнер для шаров.
Повторят знания о датчике цвета;
Соберут модель робота; Повторят интерфейс ПО (блоки: начало, рулевое и независимое направление, ожидание, цикл, звук, экран, переключатель, знакомство с блоками математики и переменных);
Занятие 29-30: Дети пишут свой проект. Придумывают модель робота и пишут для него программу.
Занятие 31: Дети доделывают проект, вносят коррективы. Защищают проекты перед родителями.
Занятие 32: Итоговый тест.
Занятие 1: Лифт-подъемный механизм
. Знакомство с программой.
Изучение основных механизмов в конструкциях. Основы программирования. Сборка механизмов из блоков LEGO WeDo. Использование двигателя и шкива для создания модели лебедки лифта.
Занятие 2: Стрекоза.
Обсуждение вопросов связанных с насекомыми.
Построение модели робо-стрекозы. Применение механизмов зубчатой передачи для движения робота. Использование мотора как двигателя механизма. Практическое применение зубчатой придачи, использование различных шестеренок. Знакомство с циклом, блоками программирования моторов.
Занятие 3: Лягушка.
Обсуждение принципов работы датчиков. Изучение лягушки и построение модели. Построение модели лягушки из блоков LEGO WeDo. Использование датчиков для запуска программы. Использование условного оператора в задаче программирования. Использование цикла в программе.
Занятие 4: Пеликан.
Обсуждение разновидностей птиц, мест их обитания и строение.
Строительство модели птицы из блоков LEGO WeDo. Использование циклов и режима ожидания.
Изучение работы повышенной зубчатой передачи. Совместное использование ременной и зубчатой передачи. Изучение систем шкивов и ремней (ременных передач) и механизма замедления, работающих в модели.
Занятие 5: Аллигатор.
Изучение систем шкивов и ремней (ременных передач).
Изучение жизни животных. Создание и программирование моделей с целью демонстрации знаний и умения работать с цифровыми инструментами и технологическими схемами. Построение модели аллигатора из блоков LEGO WeDo и ее испытание. Усложнение поведения за счет установки на модель датчика расстояния и синхронизации звука с движением модели.
Занятие 6: Лев.
Изучение процесса передачи движения и преобразования энергии в модели. Ознакомление с работой коронного зубчатого колеса в этой модели. Изучение льва, его строения, место обитания. Создание и испытание движущейся модели льва. Усложнение поведения путем добавления управление голосом и
программирования воспроизведения звуков синхронно с движениями льва. Понимание того, как при помощи зубчатых колёс можно изменить направление
движения. Понимание и использование числового способа задания звуков и
продолжительности работы мотора.
Занятие 7: Лягушка.
Знакомство с системой шкивов и ремней (ременных передач), работающих в модели. Анализ влияния смены ремня на направление и скорость движения. Построение, программирование и испытание модели «Лягушка». Изучение процесса передачи движения и преобразования энергии в модели. Изучение кулачкового механизма, работающего в модели. Понимание основных принципов проведения испытаний и их обсуждение.
Занятие 8: Жираф.
Изучение рычажного механизма. Создание и испытание модели жирафа из блоков LEGO WeDo. Программирование соответствующего звукового сопровождения. Усложнение поведения за счет установки на модель датчика наклона.
Построение и изучение сложного механизма. Изучение строения, местообитание жирафа.
Занятие 9: Обезьяна.
Изучение рычажного механизма и влияние конфигурации кулачкового механизма на ритм барабанной дроби. Создание и испытание модели барабанящей обезьянки. Модификация конструкции модели путём изменения кулачкового механизма с целью изменения ритма движений рычагов. Программирование соответствующего звукового сопровождения, чтобы поведение модели стало более эффектным.
Занятие 10: Промежуточный тест. (теория, конструирование, практика)
Занятие 11: Самолет.
Построение модели самолёта, испытание её движения и уровня мощности мотора. Усовершенствование модели самолёта путём программирования звуков, зависящих от показаний датчика наклона. Понимание и использование принципа управления звуком и мощностью мотора при помощи датчика наклона. Изучение процесса передачи движения и преобразования энергии в модели.
Занятие 12: Нефтяная вышка.
Понимание концепции и обсуждения свойств энергетических ресурсов на примере нефти масло. Обсуждение роли двигателя внутреннего сгорания в промышленном развитии. Построение модели насоса из блоков LEGO WeDo. Использование датчика расстояния для построения системы управления.
Использование кривошипного механизма для сборки насоса. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Создание программы в соответствии с алгоритмом, который добавляет и вычитает из фиксированного значения. Практическое использование операций сложения и вычитания до 10.
Занятие 13: Ветряк.
Обсуждение типов возобновляемых источников энергии и способов их использования пример ветровой турбины. Определение концепции скорости.
Строительство модели ветряной мельницы из блоков LEGO WeDo. Обсуждение работы механизмов и их различных типов и их практических. Программирование структуры в соответствии с алгоритмом, который учитывает вращение винта мельницы. Использование показаний датчика расстояния для запуска математической
операции. Использование добавления в задаче программирования. Использование деления при расчете передаточных чисел.
Занятие 14: Пожарная машина.
Обсуждение вопросов, связанных с явлением сжигания.
Построение модели пожарного двигателя из блоков LEGO WeDo. Применение механизмов преобразования вращения к поступательному движению. Использование датчика наклона для изменения работы робота в зависимости от положение лестницы. Практическое применение свойств червячной передачи и зубчатого механизма. Использование датчика наклона для программирования системы управления автомобилем кочегар. Использование компьютерной клавиатуры для программирования системы управления автомобилем. Использование операций сложения и вычитания до 10 в задаче программирование.
Занятие 15: Вилочный погрузчик.
Знание о конструкции и работе штабелера Обсуждение роли развития робототехники в промышленности и логистике. Строительство штабелера с блоками LEGO WeDo. Использование червячного механизма для сборки накопителя. Использование датчика наклона для создания системы управления укладчиком. Использование датчика наклона для программирования системы управления укладчиком. Использование условного оператора в задаче программирования
Занятие 16: Лифт.
Понимание концепции простых машин на примере рычага и шкива.
Понимание приложений простых машин в строительстве на других построениях. Понимание механизма работы лифта. Создание модели лифта с блоками LEGO WeDo.
Использование двигателя и шкива для создания модели лебедки лифта. Использование компьютерной клавиатуры для программирования системы управления. Измерение и сравнение измерений времени с секундомером.
З
анятие 17: Вертолет.
Обсуждение источника вертолетного носителя. Сравнение конструкции и эксплуатации самолета и вертолета. Строительство вертолетной модели от блоков LEGO WeDo. Использование вала для сборки вертолетного привода. Использование датчика наклона для создания системы управления вертолетом. Использование механизма для создания вертолетного привода. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Использование условных инструкций и программных циклов. Использование многопоточной программы.
Занятие 18: Манипулятор.
Понимание влияния развития робототехники на деятельность человека. Обсуждение принципов выбора строительных решений для специфики конкретных задач. Создание модели манипулятора из блоков LEGO WeDo. Использование датчика наклона для создания системы управления
манипуляторами. Использование червячного механизма для создания захвата манипулятора. Использование датчика наклона для программирования системы управления манипуляторами. Использование многофункциональной программы. Использование математических операций (деление). Измерение и сравнение измерений времени с секундомером.
Занятие 19: Кран.
Обсуждение принципов работы простых машин. Знание конструкции и принципов работы крана. Построение модели крана из блоков LEGO WeDo. Использование зубчатого зацепления для сборки вращающейся крановой
башни. Использование датчика наклона для создания системы управления краном. Использование датчика наклона для программирования системы управления
краном. Использование условного оператора в задаче программирования.
Занятие 20: Промежуточный тест(теория, конструирование, практика)
Занятие 21: Соревнования.
Проверка на знание механизмов детей после прохождения всех 3 блоков. Проверка на использование блоков программирования. Проверка скорости конструирования. Проверка на правильность конструкции.
Занятие 22: Дройд.
Понимание концепции и обсуждения свойств сигнализации, охранных систем. Обсуждение роли датчиков в жизни человека. Построение модели друида из блоков LEGO WeDo. Использование датчика расстояния для построения охранной системы. Использование сложного углового механизма для работы охранной
системы. Программирование структуры в соответствии с алгоритмом, который делает
зависимость работы моторов и звуков от датчика расстояния.
Занятие 23: Катапульта.
Изучение рычажного механизма. Создание и испытание модели космической катапульты. Модификация конструкции модели путём изменения кулачкового механизма. Построение модели катапульты из блоков LEGO WeDo. Использование ремня для удержания. Использование датчика наклона для создания системы управления
Занятие 24: Шагоход.
Программирование структуры в соответствии с алгоритмом, который делает зависимость работы моторов и звуков от датчика расстояния. Построение модели шагохода из блоков LEGO WeDo. Использование датчика расстояния для построения системы управления. Использование червячного механизма для сборки шагохода.
Занятие 25: Спутники.
Изучение работы спутников земли. Построение и изучение работы спутников земли. Использование датчика расстояния для построения системы управления. Программирование структуры в соответствии с алгоритмом, который делает
зависимость скорости двигателя от значения дисплея датчика расстояния.
Занятие 26: Галактическая игра
. Обсуждение принципов работы простых машин. Изучение конструкции и принципов работы конвейера. Построение модели крана из блоков LEGO WeDo. Использование шинного зацепления для сборки вращающегося конвейера. Использование датчика наклона для создания системы управления скоростью и направлению вращения мотора. Использование условного оператора в задаче программирования.
Занятие 27: Знание о конструкции и работе многоколесного робота-марсохода
. Обсуждение роли развития робототехники в освоении других планет. Строительство марсохода из блоков LEGO WeDo. Использование червячного механизма для движения переднеприводного робота. Использование кубиков для движения робота как боковые колеса. Программирование структуры в соответствии с алгоритмом, который делает зависимость скорости двигателя от значения дисплея датчика расстояния. Конструирование модели. Написание для нее программы. Изучение соревнований.
Занятие 28: Круглые роботы.
Знание о конструкции и работе круглого робота-лунохода. Обсуждение роли развития робототехники в освоении других планет. Строительство лунохода из блоков LEGO WeDo. Использование червячного механизма для движения конструкции всего робота. Использование кубиков для движения робота как боковые колеса.
Занятие 29: Космолет.
Обсуждение работы космолетов и ракет. Сравнение конструкций ракеты и космолета. Строительство космолета из блоков LEGO WeDo. Использование сложного механизма в построении космолета. Использование датчика наклона для создания системы управления космолетом. Программирование соответствующего звукового сопровождения, чтобы поведение модели стало более эффектным. Программирование структуры в соответствии с алгоритмом. Использование условных инструкций и программных циклов
Занятие 30: Станция связи.
Планирование и сборка станции связи. Практическое использование изученных передач. Использование знаний о датчиков и моторов, для построение автоматизированной станции связи. Развитие навыков группового взаимодействия.
Занятие 31: Космическая станция.
Закрепление полученных знаний в ходе блока обучения. Построение выбранного роботизированного механизма из блоков Lego
Wedo. Использование датчиков для управления. Использование изученных механизмов для сборки роботов для космоса, доработка. Практическое использование функций в скрипте, использование
переменных. Практическое использование сложения и вычитания, умножения и деления. Обсуждение и планирование единой системы по освоению космоса. Создание программ в соответствии с алгоритмом и поставленными задачами
Занятие 32: Итоговый тест.